
05 May Obstacle avoidance using a 3D camera
Researchers from the Technical University of Munich have developed a new navigation system for blind people. What is their solution? Combining a 3D camera capable of detecting obstacles with a haptic feedback system.
Navigation and obstacle avoidance are some of the most difficult tasks for the visually impaired. Various technological research projects have tried to address this issue, but nothing has yet been able to replace the white cane. This new device, however, has the potential to change that.
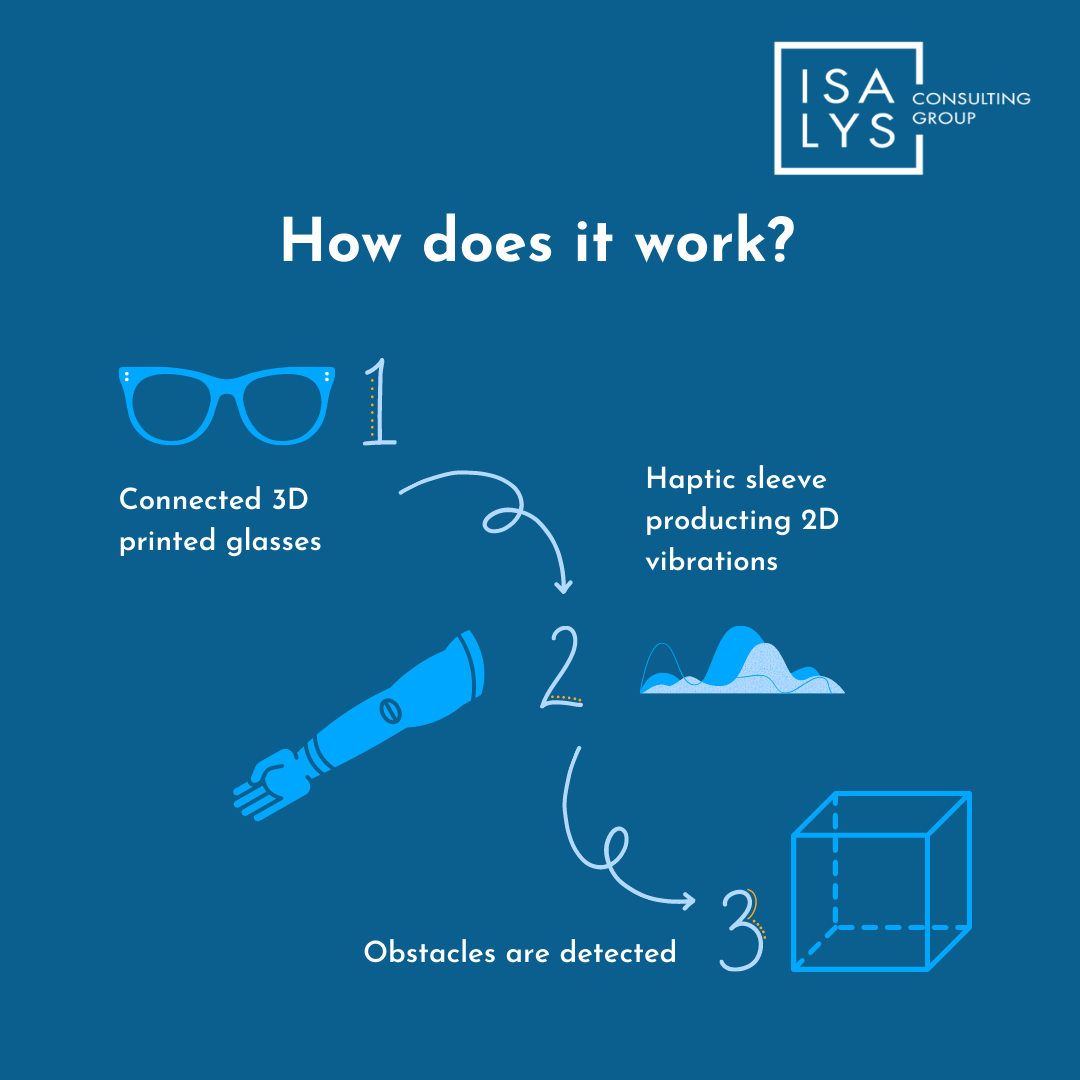
How does it work?
Their invention is made up of two parts. The first one is a pair of 3D printed “glasses”. Theses glasses, just like the motion tracking systems used for virtual reality headsets, use cameras to record a stereoscopic image of the environment to build a 3D map. The system maps the camera’s distance information onto a 2D vibration array on the forearm.
The glasses are indeed connected to a vibrating handle which is the second part of the device. It signals the presence of an obstacle by indicating to the wearer its precise location and distance using its 25 actuators. As a result, the wearer can navigate without having his hands encumbered. The system is independent of lighting conditions and has two operating modes: indoors with a maximum detection range of three meters, and outdoors with a minimum detecting range of two meters.
Volunteers who tested the system were able to navigate and localize correctly up to 98.6% of the time with single motor vibration patterns, and up to 70% of the time with multiple obstacles and haptic feedbacks. Moreover, users demonstrated improvement over multiple runs. The researchers intend to improve their invention further, with the goal of incorporating object recognition to generate paths to improve navigation in large open spaces.